Содержание:
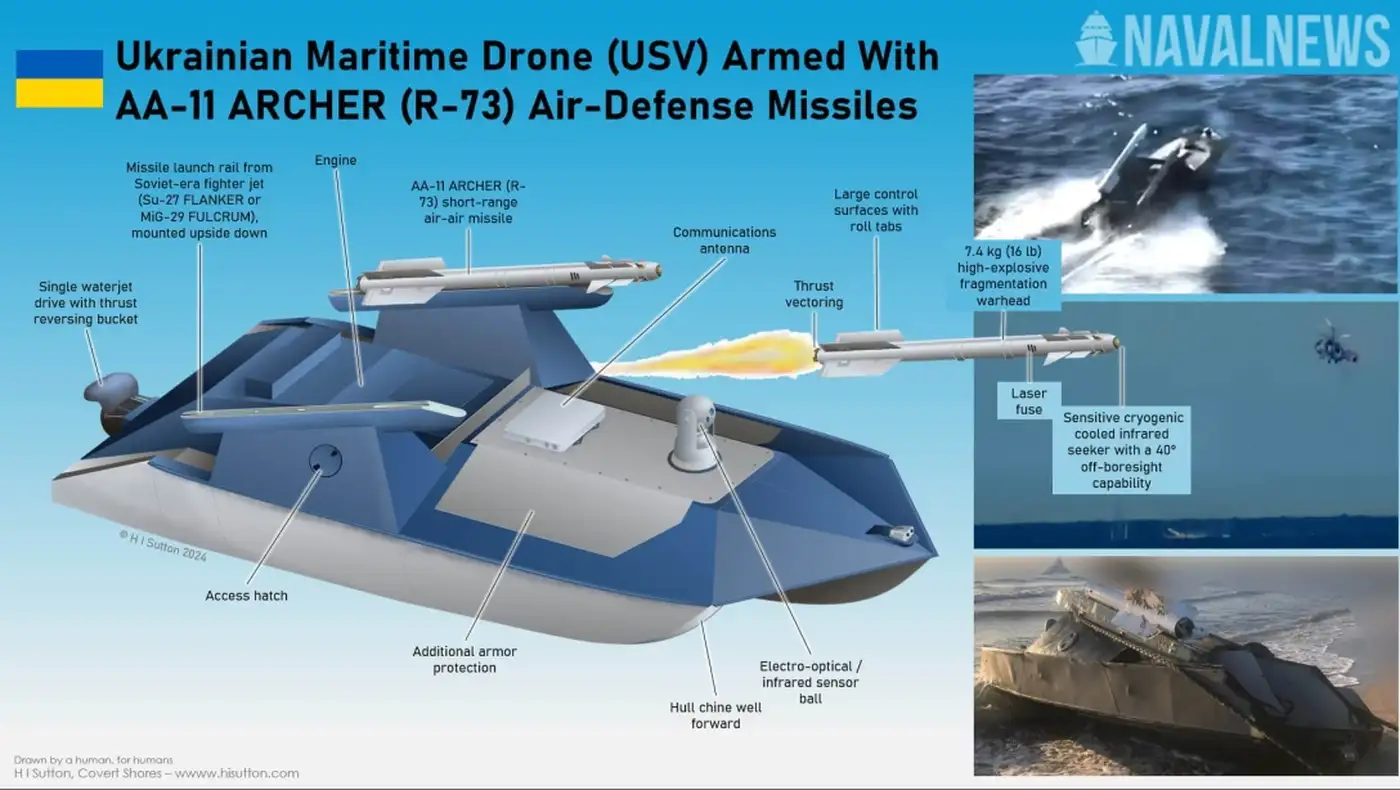
Основная сложность в применении ракет класса «воздух‐воздух» (особенно таких, как Р‐73 с тепловой головкой самонаведения) с морских беспилотных катеров (БЭК) заключается в том, что они изначально спроектированы для запуска с самолётов или вертолётов. Ниже ― несколько основных причин, почему на самолёте применять такие ракеты проще, а на морском дроне ― крайне проблематично (и что, судя по имеющейся информации, пытаются «допилить» инженеры Украины).
1. Отсутствие штатных систем управления и наведения

На самолёте.
У Р‐73 есть тепловая ГСН (головка самонаведения), которая сама «видит» инфракрасную сигнатуру цели. Но в стандартной авиационной конфигурации эта ракета получает целеуказание и предварительный захват цели от авионики носителя или от пилота с помощью нашлемной системы. То есть на истребителе есть:
- Бортовой радар, способный обнаружить цель и «подсветить» её для ракеты.
- Тепловизионные/оптические станции (если такие установлены).
- Нашлемная система целеуказания (в некоторых модификациях), чтобы пилот мог «повернуть голову», и ракета захватывает цель под большим углом.
Все эти системы изначально интегрированы и работают согласованно, обмениваясь необходимыми данными (курсом, углами, сигналами «цель захвачена» и т. д.). После получения сигнала «цель захвачена» ракета готова к запуску. Однако даже при таких условиях возможны сбои в работе. Например, есть случаи неудачного пуска ракеты Р-73 с МиГ-29.
На морском дроне.
Маленький беспилотный катер не имеет ни штатной авиационной АСУ (автоматизированной системы управления), ни радаров, рассчитанных на работу «по воздуху» на десятки километров, ни тем более нашлемного прицела.
- Нужно как-то заставить ракету «схватить» цель и удерживать её захват, пока Р‐73 ещё на направляющей.
- Требуется внешняя оптико-электронная система (камеры, тепловизоры), способная выдать ракете информацию о цели и её точном положении.
- Между электроникой БЭК и электроникой самой ракеты требуется «спарка» (аппаратно-программный интерфейс), который в заводском исполнении просто не предусмотрен.
Судя по всему, украинские инженеры пытаются адаптировать систему телеуправления дрона (его видеокамеры или тепловизоры) и «обучить» ракету получать/подтверждать захват цели. Это очень нетривиальная задача.
2. Сложная кинематика пуска с поверхности воды
На самолёте.
Самолёт уже летит на скорости в сотни км/ч и может подобрать оптимальный ракурс пуска. Ракета стартует с определённой высоты и скорости, что упрощает:
- Захват цели (цель видна без сильных помех от окружающих фоновых объектов).
- «Вписывание» ракеты в траекторию (двигатель работает в привычном режиме, аэродинамика не «закрыта» поверхностью).
На морском дроне.
Запуск происходит на очень маленькой высоте, фактически над водой, причём под сильной качкой и при минимальной начальной скорости носителя (практически нулевой). Это даёт ряд проблем:
- Риск «заглатывания» ракетой брызг воды или ударной волны сразу после старта (особенно если нет специальной пусковой шахты или тележки).
- Проблемы с захватом цели по тепловому каналу из-за фоновых помех (отражения от воды, низкий угол визирования, нестабильная площадка).
- Сложность точной стабилизации и выдерживания ракеты по курсу в момент пуска (любое наклонение катера может увести ГСН от «захваченного» пятна цели).

3. Ограниченная дальность обнаружения и реальная эффективная дальность
Р‐73 считается ракетой ближнего воздушного боя. Её максимальная дальность пуска, заявленная для последних модификаций, может достигать 30–40 км (но реальная эффективная, особенно при запуске «на догоне», обычно короче).

На самолёте.
- Пилот видит вертолёт/самолёт противника на радаре или визуально.
- Может «сблизиться» на нужную дистанцию, взять цель на прицел и произвести пуск.
На морском дроне.
- Нужен либо внешний целеуказатель (допустим, разведывательный БПЛА или спутниковое наведение), либо очень хорошая бортовая оптика.
- Если вертолёт противника летит на высоте 500–1000 м, линию горизонта с поверхности моря банально перекрывает кривизна Земли уже на расстоянии 30–40 км. Это создаёт дополнительные сложности для дальнего обнаружения (дрон «не видит» цель за горизонтом).
- Нужно «подойти» ближе к объекту атаки, что само по себе небезопасно и требует скрытности.
4. Что именно смогли сделать украинские инженеры
По имеющейся в открытых источниках информации (а прямых подтверждений реальных боевых пусков пока мало), украинские специалисты пытаются:
- Стабилизировать пусковую установку на самом дроне (чтобы ракета при выходе «в небо» не теряла цель).
- Использовать оптические/тепловизионные камеры самого катера в качестве первичного источника целеуказания, дабы «показать» ракете нужную точку, куда смотреть.
- Адаптировать систему управления (возможно, написать софт, который имитирует сигналы от авиационного блока наведения, чтобы ракета «думала», что стартует с самолёта).
- Расширить радиус «глаза» дрона за счёт внешнего разведывательного канала (БПЛА, спутниковые данные о местоположении вражеских вертолётов и т.п.).
В теории это даёт возможность, находясь на удалении от берега, «подкараулить» низко летящий вражеский вертолёт и выполнить залп, когда ракета уже «схватила» цель по тепловому каналу. Но задача очень сложная технически.
Итог
- На самолёте всё давно отлажено: Р‐73 стыкуется с «родной» авионикой, есть радары, нашлемные прицелы, компенсация высоты и скорости.
- На морском дроне такого «комплекта» систем нет, приходится изобретать сложные «обходные» решения, чтобы дать ракете точное целеуказание, стабилизировать пуск и вообще запустить её так, чтобы не помешали качка, брызги и ограниченная видимость за линией горизонта.
Украинские инженеры пытаются «дописать» и «допилить» эти решения, используя доступное оборудование (оптику, тепловизоры, систему управления дрона), чтобы дать «умный» целеуказатель Р‐73 и организовать запуск с морской платформы. Получится ли это полноценно и насколько всё эффективно ― покажет практика.